-
4K resolution in OpenCV with DELL UltraShap

I’ve recently been experimenting with computer vision using OpenCV, and for my setup, I’m using a Dell UltraSharp webcam to capture images. Out of the box, OpenCV makes it easy to grab frames at 1920×1080 (Full HD), which is great—but according to the camera’s specifications, it should support 3840×2160 (4K) resolution. Interestingly, when I tested…
-
MODBUS control of VFD
A long time ago I brought a variable frequency drive which I want to use for driving a spindle motor for a milling machine. The VFD is a Huanyang Inverter HY01D523B (1.5 kW, 7A, 220V 50Hz). I want to be able to control it through the MODBUS interface to be able to change speed and…
-
Sling forces in 4-point configuration

When there are more than three slings attached to one load, then the configuration is statically indeterminate. Therefore, one must consider the stiffness of the slings to compute the load in each of them. I am assuming that the load does not deform. Certifying bodies require this kind of calculation for four-point lifts. The hook load…
-
Leapfrog and forward Euler numerical integration.
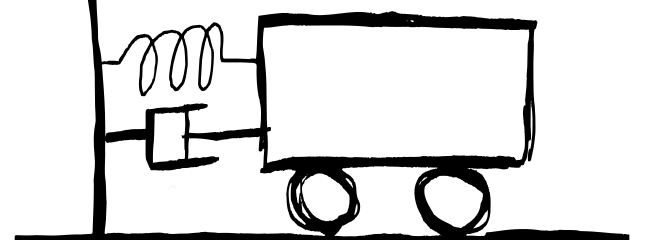
In this post I’m showing how to program a Leap-Frog integrator. Its performance of it is compared to the Forward-Euler integration method and an analytical solution. The methods are for solving ordinary differential equations. A MATLAB program shows how the methods can be implemented. For the testing, a very simple mechanical system is considered. It…
-
Sling forces
If there is a box on a pallet which will have to be lifted and you were asked to calculate the force in each of the three slings, then use vectors! Imagine a coordinate system with the x-axis along one edge of the pallet and the y-axis along the other and the z-axis vertical, then…
-
The Logo
The logo is inspired by a nice proof of a very used mathematical equation. I first saw this proof of Pythagoras here: Impossible squares – Numberphile. Strange that I never came across a proof before. Anyway, Here’s the short version. The area of the large square is . The area of the small square is…